RoboND-Home-Service
Home Service Robot
This project is the final project of the Udacity Robotics Software Engineer Nanodegree. For the project, I created several ROS packages supported by ROS libraries to simulate a home service robot performing pick up and drop off operations in a home-style environment.
Installation & Build
ROS Kinetic
The project was developed on Ubuntu 16.04 LTS with ROS Kinetic, Gazebo and catkin installed. Other dependencies can be installed through rosdep after the supporting packages have been cloned from Github.
Supporting Packages
First, there are four supporting packages to install for the project.
- slam_gmapping provides SLAM capability in conjunction with the gmapping package.
- turtlebot provides underlying drivers and specifications for the Turtlebot 2 in ROS Kinetic, and also keyboard control functionality for this project.
- turtlebot_interactions provides the RViz launcher scripts.
- turtlebot_simulator connects the Turtlebot packages with the Gazebo environment.
rosdep Dependencies
After cloning the supporting package in catkin_ws/src, run rosdep on each of the package names to install their dependencies.
rosdep -i install gmapping
rosdep -i install turtlebot
If these commands do not work, or the project cannot be compiled afterwards, try to use apt-get to install these packages: ros-kinetic-turtlebot ros-kinetic-openslam-gmapping.
Building the Workspace
Use catkin to build the packages from source. From catkin_ws, run:
catkin_make; source devel/setup.bash
to build the workspace packages and add them to the paths of ROS.
Running the Scripts
After the above steps, you should be able to run each of the shell scripts in the ShellScripts directory.
Project Content
Directory Structure
The project repository contains source code of a catkin workspace and some map and world files for the simulation of the home service robot. Besides the supporting ROS packages described in the previous section, there are also three packages with custom ROS node in the src directory:
wall_followeruses a modified script provided by Udacity to instruct the robot to traverse around the room while following the walls using laser scan data.pick_objectsis a node that publish static goals to the goal topic and thus directs the robot through the navigation packages.add_markerscontains two nodes that publishes markers in RViz. Theadd_constant_markers_nodepublishes markers at the goal positions with constant time intervals, while theadd_markers_nodepublishes the markers in response to the robot’s movements in the environment. Note how the second node uses theMarkerAdderclass that inherits from theCustomMarkerAdderclass used in the first node!
Besides the packages, the repository also contains supporting files:
RVizConfigcontains the config file for RViz that extends the RViz launcher’s config file fromturtlebot_interactionsto include markers.Worldincludes a house model built in Gazebo’s Building Editor, and a map produced from the robot performing SLAM in the house.ShellScriptscontains all the composite scripts to run each task of the project, and also supporting XML launch filesamcl_demo.launch,gmapping_demo.launchandview_navigation.launchwith customized parameters.
Tasks
The robot can perform a few tasks with the shell scripts.
Test Slam
The test_slam.sh script simply launches Gazebo with the home environment, places a turtlebot in it and launches the slam_gmapping nodes. The user can move the robot in the environment using keyboard as in turtlebot_teleop. Run this script to verify that the packages and dependencies have been installed correctly.
Wall Follower
The wall_follower.sh script differs from the test_slam.sh script in that the robot would be able to move autonomously around the room without and user input using the wall_follower node.
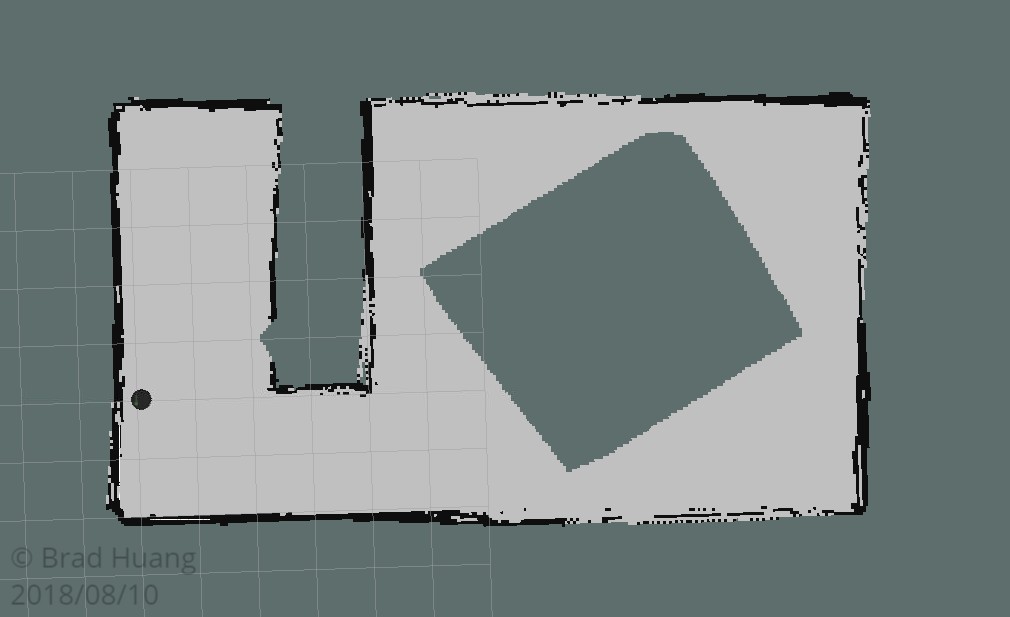
Map produced by performing SLAM while following walls:
Test Navigation
The tesst_navigation.sh script builds on top of the test_slam.sh script and enables the robot to reach a goal pose designated by the user in RViz through the amcl package.
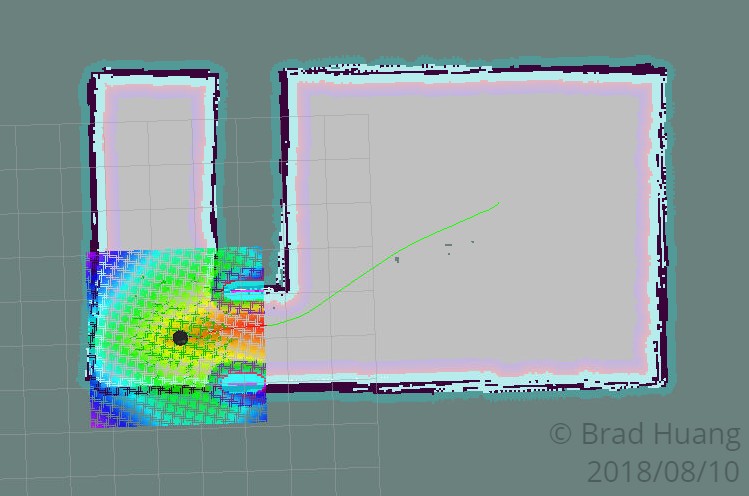
Robot planning to reach the goal in RViz:
Pick Objects
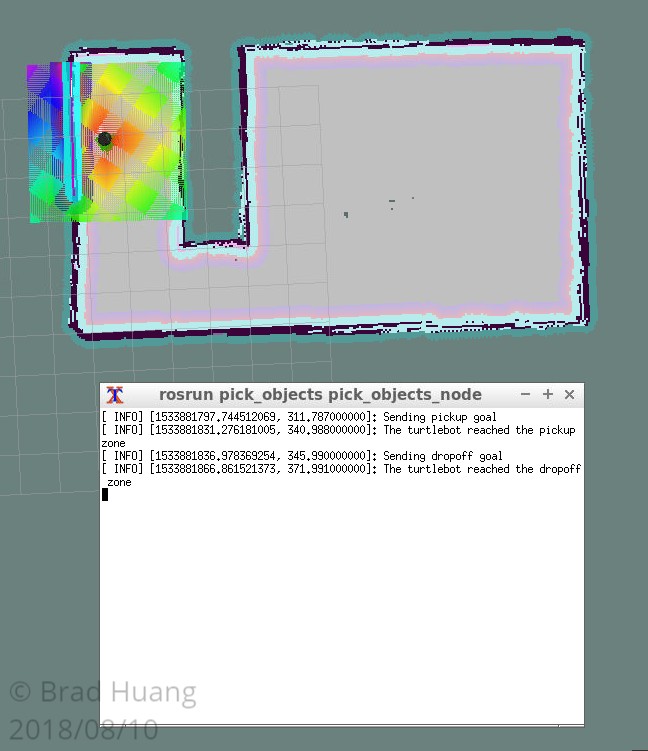
The pick_objects.sh script assigns two goal poses to the robot consecutively as the robot traverses through the environment to simulate picking up objects from a location and dropping them off to another location.
Robot reaching the dropoff location:
Add Marker
The add_marker.sh script adds markers to the goal positions at constant times programmatically as the robot moves through the environment.
Home Service
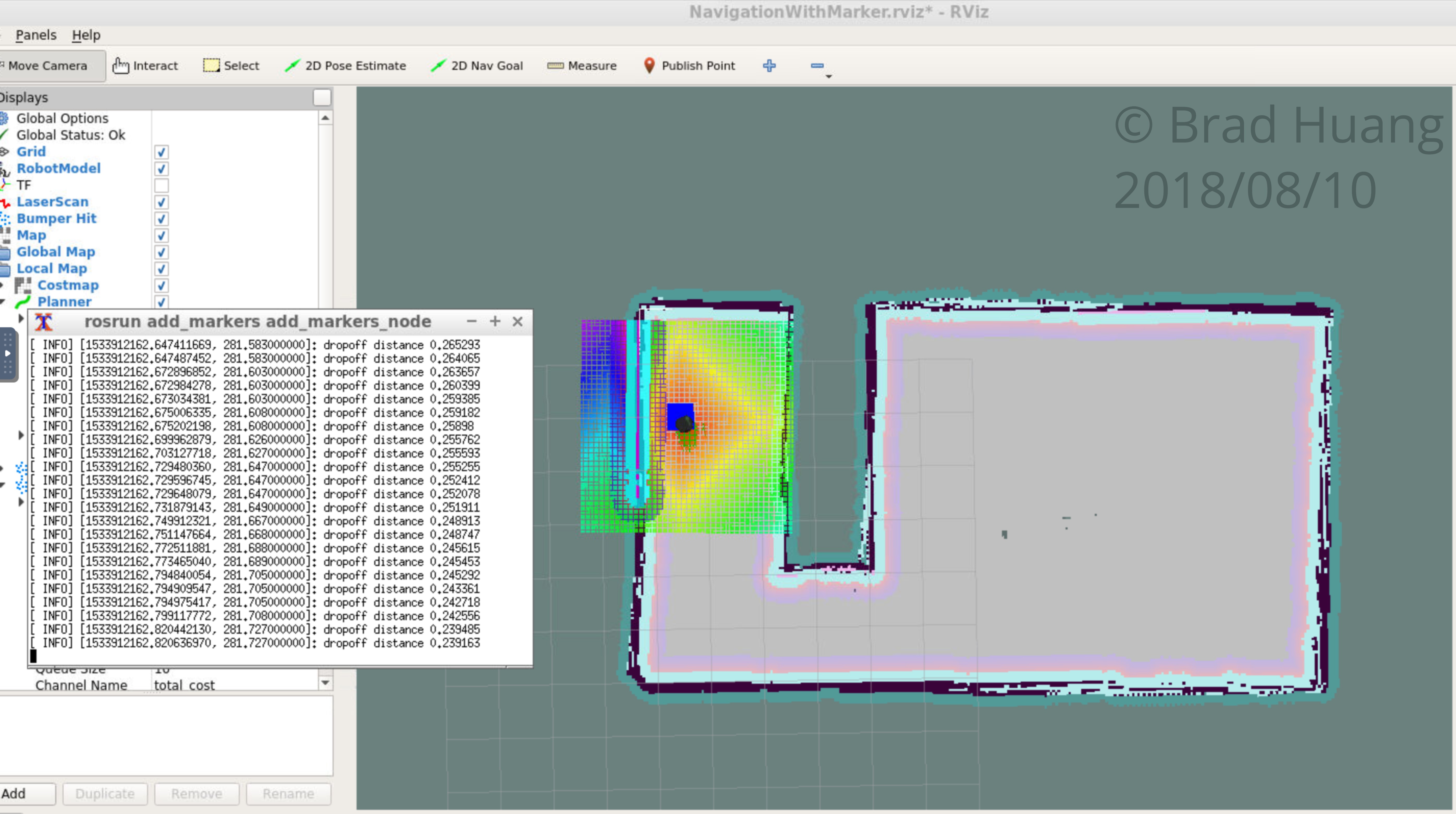
The final script home_service.sh adds goal markers only when the robot is reaching the pick up and drop off locations by listening to the odometry topic.
Robot reaching the dropoff location while showing the marker: